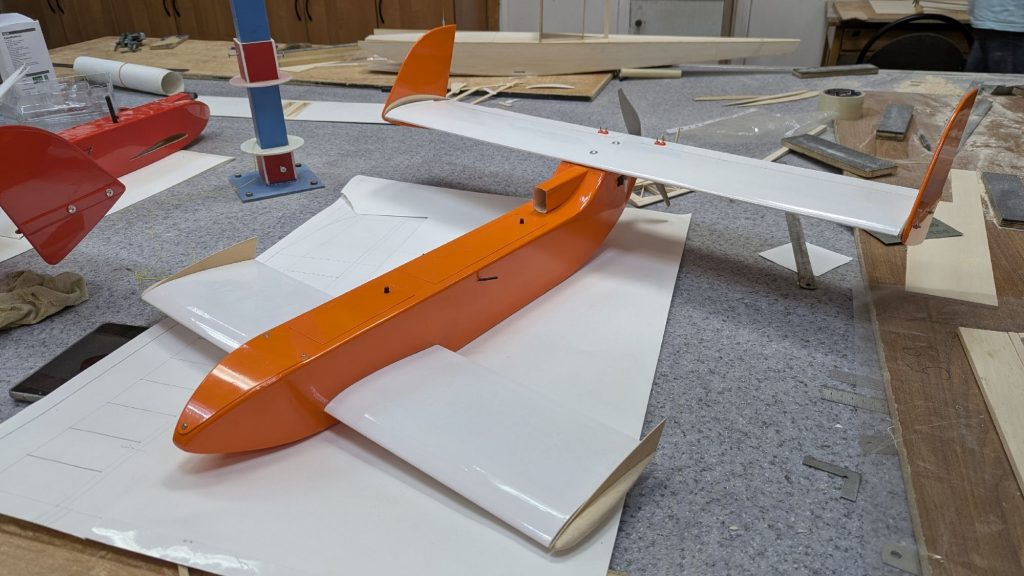
This configuration of the model allows the model to more easily master the control of models with a motor. This is reflected in the better stability of the model and the inability to get into a tailspin.

Okay.